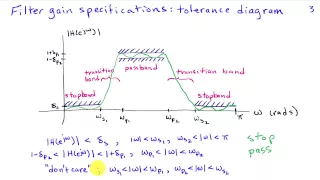
Introduction to Frequency Selective Filtering
http://AllSignalProcessing.com for free e-book on frequency relationships and more great signal processing content, including concept/screenshot files, quizzes, MATLAB and data files. Separation of signals based on frequency content using lowpass, highpass, bandpass, etc filters. Filter g
From playlist Introduction to Filter Design
From playlist filter (less comfortable)

Why Use Kalman Filters? | Understanding Kalman Filters, Part 1
Download our Kalman Filter Virtual Lab to practice linear and extended Kalman filter design of a pendulum system with interactive exercises and animations in MATLAB and Simulink: https://bit.ly/3g5AwyS Discover common uses of Kalman filters by walking through some examples. A Kalman filte
From playlist Understanding Kalman Filters

Special Topics - The Kalman Filter (1 of 55) What is a Kalman Filter?
Visit http://ilectureonline.com for more math and science lectures! In this video I will explain what is Kalman filter and how is it used. Next video in this series can be seen at: https://youtu.be/tk3OJjKTDnQ
From playlist SPECIAL TOPICS 1 - THE KALMAN FILTER
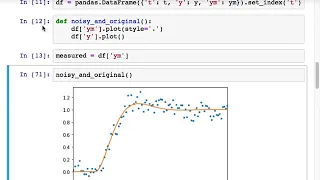
I discuss causal and non-causal noise filters: the moving average filter and the exponentially weighted moving average. I show how to do this filtering in Excel and Python
From playlist Discrete

Frequency domain – tutorial 3: filtering (periodic signals)
In this video, we learn about filtering which enables us to manipulate the frequency content of a signal. A common filtering application is to preserve desired frequencies and reject the unwanted content. The learning objectives are to: 1) review the filtering concept using Fourier series
From playlist Fourier

http://AllSignalProcessing.com for more great signal processing content, including concept/screenshot files, quizzes, MATLAB and data files. Noncausal filtering of stored data to obtain zero-phase response using the time-reversal property of the DFT, as implemented by the "filtfilt" comma
From playlist Introduction to Filter Design

Introduction to Minimum Mean-Squared-Error Filtering
Introduces the basic framework for MMSE filtering and applications to system modeling, equalization, and interference suppression.
From playlist MMSE Filtering

Special Topics - The Kalman Filter (7 of 55) The Multi-Dimension Model 1
Visit http://ilectureonline.com for more math and science lectures! In this video I will explain the overview of the Kalman filter on a multi dimension model. Next video in this series can be seen at: https://youtu.be/F7vQXNro7pE
From playlist SPECIAL TOPICS 1 - THE KALMAN FILTER

Introduction to Filter Design HDL Coder
Get a Free Trial: https://goo.gl/C2Y9A5 Get Pricing Info: https://goo.gl/kDvGHt Ready to Buy: https://goo.gl/vsIeA5 Get a brief introduction to Filter Design HDL Coder. For more videos, visit http://www.mathworks.com/products/filterhdl/examples.html
From playlist Code Generation and Verification

Gabriel Goldberg: The Jackson analysis and the strongest hypotheses
HYBRID EVENT Recorded during the meeting "XVI International Luminy Workshop in Set Theory" the September 13, 2021 by the Centre International de Rencontres Mathématiques (Marseille, France) Filmmaker: Guillaume Hennenfent Find this video and other talks given by worldwide mathematician
From playlist Logic and Foundations

Designing Digital Filters with MATLAB
Free MATLAB Trial: https://goo.gl/yXuXnS Request a Quote: https://goo.gl/wNKDSg Contact Us: https://goo.gl/RjJAkE Learn more about MATLAB: https://goo.gl/8QV7ZZ Learn more about Simulink: https://goo.gl/nqnbLe Filters are a fundamental component of digital signal processing. As demonstra
From playlist Perception: MATLAB and Simulink Robotics Arena
AMMI 2022 Course "Geometric Deep Learning" - Lecture 8 (Groups & Homogeneous spaces) - Taco Cohen
Video recording of the course "Geometric Deep Learning" taught in the African Master in Machine Intelligence in July 2022 by Michael Bronstein (Oxford), Joan Bruna (NYU), Taco Cohen (Qualcomm), and Petar Veličković (DeepMind) Lecture 8: Group convolution • Regular representation • Spheric
From playlist AMMI Geometric Deep Learning Course - Second Edition (2022)

Lec 17 | MIT RES.6-008 Digital Signal Processing, 1975
Lecture 17: Design of FIR digital filters Instructor: Alan V. Oppenheim View the complete course: http://ocw.mit.edu/RES6-008S11 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT RES.6-008 Digital Signal Processing, 1975

Lec 14 | MIT RES.6-008 Digital Signal Processing, 1975
Lecture 14: Design of IIR digital filters, part 1 Instructor: Alan V. Oppenheim View the complete course: http://ocw.mit.edu/RES6-008S11 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT RES.6-008 Digital Signal Processing, 1975

Band-pass filtering and the filter-Hilbert method
The Hilbert transform produces uninterpretable results on broadband data. You will need to narrow-band filter the signal first. This video shows one method of computing an FIR filter and applying it to EEG data. Together with the Hilbert transform, this gives us the filter-Hilbert method.
From playlist OLD ANTS #4) Time-frequency analysis via other methods
30 years ago a man attempted to denoise medical imagery and unknowingly set off a chain reaction of research developments leading to a modern day post processing effect that transforms images into paintings, but how did he do it? Download my GShade shader pack! https://github.com/GarrettG
From playlist Post Processing

GED for spatial filtering and dimensionality reduction
Generalized eigendecomposition is a powerful method of spatial filtering in order to extract components from the data. You'll learn the theory, motivations, and see a few examples. Also discussed is the dangers of overfitting noise and few ways to avoid it. The video uses files you can do
From playlist OLD ANTS #9) Matrix analysis

Duality between estimation and control - Sanjoy Mitter
PROGRAM: Data Assimilation Research Program Venue: Centre for Applicable Mathematics-TIFR and Indian Institute of Science Dates: 04 - 23 July, 2011 DESCRIPTION: Data assimilation (DA) is a powerful and versatile method for combining observational data of a system with its dynamical mod
From playlist Data Assimilation Research Program

reaLD 3D glasses filter with a linear polarising filter
This is for a post on my blog: http://blog.stevemould.com
From playlist Everything in chronological order