
From playlist Stokes' theorem
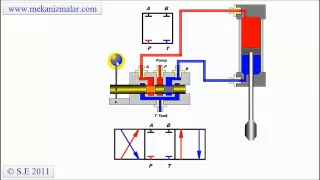
http://www.mekanizmalar.com This is a flash animation of a hydraulic closed center valve.
From playlist Pneumatic and Hydraulics

Closed Loop Hydrostatic Transmission
http://www.mekanizmalar.com/closed_loop_hydraulic_transmission.html Closed loop hydrostatic transmission, also known as hydraulic transmissions is used to convert a constant horsepower input to wide range of speed and torque combination, including reverse rotation.
From playlist Pumps
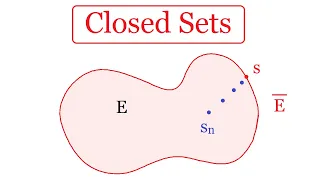
I define closed sets, an important notion in topology and analysis. It is defined in terms of limit points, and has a priori nothing to do with open sets. Yet I show the important result that a set is closed if and only if its complement is open. More topology videos can be found on my pla
From playlist Topology

Open Circuits, Closed Circuits & Short Circuits - Basic Introduction
This physics video tutorial provides a basic introduction into open circuits, closed circuits, and short circuits. An open circuit contains a break in the circuit and does not conduct electricity. The closed circuit is a circuit that conducts an electric current and has a measurable amou
From playlist New Physics Video Playlist

The end point of the connecting rod draws a straight line. This is used for moving load in horizontal direction. STEP files of this video: https://www.mediafire.com/file/kpr7swqgu98nj64/FourBarLinkageCraneSTEP.zip/file Inventor files of this video: http://www.mediafire.com/file/r37474jcdm
From playlist Mechanisms
Watch more videos on http://www.brightstorm.com/math/geometry SUBSCRIBE FOR All OUR VIDEOS! https://www.youtube.com/subscription_center?add_user=brightstorm2 VISIT BRIGHTSTORM.com FOR TONS OF VIDEO TUTORIALS AND OTHER FEATURES! http://www.brightstorm.com/ LET'S CONNECT! Facebook ► https
From playlist Geometry

From playlist Magnetism

Closed Intervals, Open Intervals, Half Open, Half Closed
00:00 Intro to intervals 00:09 What is a closed interval? 02:03 What is an open interval? 02:49 Half closed / Half open interval 05:58 Writing in interval notation
From playlist Calculus
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

12. Feedback Compensation of an Operational Amplifier
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)
Understanding and Sketching the Root Locus
In this video we discuss how to sketch the root locus for a system by developing a series of 5 core rules augmented by 5 supplemental rules (for a total of 10 rules). These rules will help us gain an understanding and intuition on how the root locus behaves as the parameter K increases fr
From playlist Control Theory

HOW IT WORKS: Car Starter Motor
This explains the functioning demonstrating gearing, operation, and engine cycling under its own power.
From playlist Mechanical Engineering

EE102: Introduction to Signals & Systems, Lecture 21
These lectures are from the EE102, the Stanford course on signals and systems, taught by Stephen Boyd in the spring quarter of 1999. More information is available at https://web.stanford.edu/~boyd/ee102/
From playlist EE102: Introduction to Signals & Systems
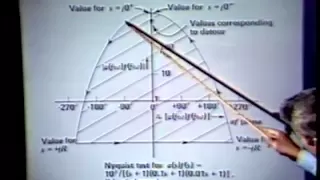
7. Stability via Frequency Response
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)
3. Introduction to Systems with Dynamics
MIT Electronic Feedback Systems (1985) View the complete course: http://ocw.mit.edu/RES6-010S13 Instructor: James K. Roberge License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Electronic Feedback Systems (1985)

Tapered turning by offsetting of the tailstock
This method more suited for shallow tapers. Approximately the set-over S = L.sinα L: distance between the blue centers α: half of taper angle Inventor files of this video: http://www.mediafire.com/file/b6c6c0r9hdx9w0h/TaperedTurningByOffsettingTailstockInv.zip/file
From playlist Mechanisms

What is Pole Placement (Full State Feedback) | State Space, Part 2
Check out the other videos in the series: https://youtube.com/playlist?list=PLn8PRpmsu08podBgFw66-IavqU2SqPg_w Part 1 - The state space equations: https://youtu.be/hpeKrMG-WP0 Part 3 - Observability and Controllability: https://youtu.be/BYvTEfNAi38 Part 4 - What Is LQR Optimal Control: ht
From playlist State Space