
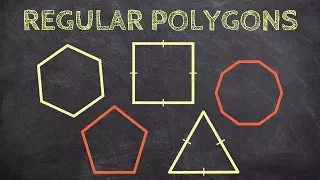
What are the names of different types of polygons based on the number of sides
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the definition of a regular polygon and how do you find the interior angles
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
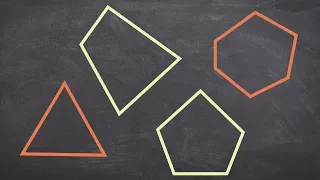
What are four types of polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
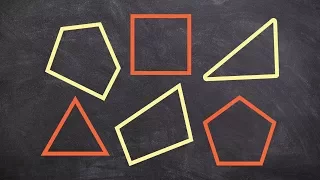
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between a regular and irregular polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

"Interior and exterior angles of regular and irregular polygons."
From playlist Shape: Angles

Weakly Modular Functions | The Geometry of SL2,Z, Section 1.4
We provide an alternative motivation for the definition of weakly modular functions. My Twitter: https://twitter.com/KristapsBalodi3 Weakly Modular Functions (0:00) Boring Functions on Compact Riemann Surfaces (2:06) Transforming the Transformation Property (9:15)
From playlist The Geometry of SL(2,Z)

Introduction to Modular Forms - Part 1 of 8
“Introduction to Modular Forms,” by Keith Conrad. Topics include Eisenstein series and q-expansions, applications to sums of squares and zeta-values, Hecke operators, eigenforms, and the L-function of a modular form. This is a video from CTNT, the Connecticut Summer School in Number Theor
From playlist CTNT 2016 - "Introduction to Modular Forms" by Keith Conrad

“Computational methods for modular and Shimura curves,” by John Voight (Part 1 of 8)
“Computational methods for modular and Shimura curves,” by John Voight (Dartmouth College). The classical method of modular symbols on modular curves is introduced to compute the action of the Hecke algebra and corresponding spaces of modular forms. Generalizations to Shimura curves will t
From playlist CTNT 2016 - “Computational methods for modular and Shimura curves" by John Voight

Annemarie Luger: Herglotz-Nevanlinna functions: realizations and generalizations
CONFERENCE Recorded during the meeting " Herglotz-Nevanlinna Functions and their Applications to Dispersive Systems and Composite Materials " the May 23, 2022 by the Centre International de Rencontres Mathématiques (Marseille, France) Filmmaker: Guillaume Hennenfent Find this video a
From playlist Analysis and its Applications

Maryna Viazovska - 3/6 Automorphic Forms and Optimization in Euclidean Space
Hadamard Lectures 2019 The goal of this lecture course, “Automorphic Forms and Optimization in Euclidean Space”, is to prove the universal optimality of the E8 and Leech lattices. This theorem is the main result of a recent preprint “Universal Optimality of the E8 and Leech Lattices and I
From playlist Hadamard Lectures 2019 - Maryna Viazovska - Automorphic Forms and Optimization in Euclidean Space
Hyperbolic geometry, Fuchsian groups and moduli spaces (Lecture 2) by Subhojoy Gupta
ORGANIZERS : C. S. Aravinda and Rukmini Dey DATE & TIME : 16 June 2018 to 25 June 2018 VENUE : Madhava Lecture Hall, ICTS, Bangalore This workshop on geometry and topology for lecturers is aimed for participants who are lecturers in universities/institutes and colleges in India. This w
From playlist Geometry and Topology for Lecturers

The Fundamental Domain | The Geometry of SL(2,Z), Section 1.2
The fundamental domain for SL(2,Z) on the complex upper half plane is described, with proof. We also derive the stabilizers of the action, and provide generators for SL(2,Z). My Twitter: https://twitter.com/KristapsBalodi3 Description of the Fundamental Domain:(0:00) Statement of Main T
From playlist The Geometry of SL(2,Z)

Cristina Câmara: Truncated Toeplitz operators
Abstract: Toeplitz matrices and operators constitute one of the most important and widely studied classes of non-self-adjoint operators. In this talk we consider truncated Toeplitz operators, a natural generalisation of finite Toeplitz matrices. They appear in various contexts, such as the
From playlist Analysis and its Applications
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Modular forms: Modular functions
This lecture is part of an online graduate course on modular forms. We classify all meromorphic modular functions, showing that they are all rational functions of the elliptic modular function j. As an application of j we use it to prove Picard's theorem that a non-constant meromorphic
From playlist Modular forms

How to determine the difference between interior and exterior angles
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

In this video, I solve Laplace's equation on the upper half-plane. For this, I use Green's functions and a clever reflection formula. At the end, I derive the celebrated "Fish" formula for the upper half-plane. Enjoy! Green's Function: https://youtu.be/kqg8L41u4Yg Partial Differential Equ
From playlist Partial Differential Equations