
Data-Driven Control: Change of Variables in Control Systems
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify the most jointly controllable and observable states. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning

Data-Driven Control: Balancing Transformation
In this lecture, we derive the balancing coordinate transformation that makes the controllability and observability Gramians equal and diagonal. This is the critical step in balanced model reduction (balanced truncation), where a handful of the most controllable and observable state direc
From playlist Data-Driven Control with Machine Learning

Data-Driven Control: Balancing Example
In this lecture, we give an example of how a change of coordinates can balance the controllability and observability of an input—output system. The example is inspired by the example in Moore’s famous 1981 IEEE TAC paper. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning

Data-Driven Control: Balanced Proper Orthogonal Decomposition
In this lecture, we introduce the balancing proper orthogonal decomposition (BPOD) to approximate balanced truncation for high-dimensional systems. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning


Michael Mandell: The strong Kunneth theorem for topological periodic cyclic homology
The lecture was held within the framework of the Hausdorff Trimester Program: K-Theory and Related Fields. Hesselholt has recently been advertising "topological periodic cyclic homology" (TP) as potentially filling some of the same roles for finite primes as periodic cyclic homology plays
From playlist HIM Lectures: Trimester Program "K-Theory and Related Fields"

EEVblog #909 - Heart Defibrillator Teardown
Defibrillator Teardown! Inside the Heartsine Samaritan Pad AED heart defibrillator. Forum: http://www.eevblog.com/forum/blog/eevblog-909-defibrillator-teardown/ Datasheets: http://www.mouser.com/ds/2/205/CS20-22moF1-475252.pdf http://www.vishay.com/docs/94386/vs-30tpspbf.pdf http://www.mo
From playlist Teardown Tuesday

Data-Driven Control: Balanced Truncation
In this lecture, we describe the balanced truncation procedure for model reduction, where a handful of the most controllable and observable state directions are kept for the reduced-order model. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning
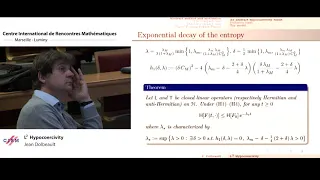
Jean Dolbeault: L^2 Hypocoercivity
The purpose of the $L^2$ hypocoercivity method is to obtain rates for solutions of linear kinetic equations without regularizing effects, in asymptotic regimes. Initially intended for systems with confinement in position space and simple local equilibria, the method has been extended to va
From playlist Mathematical Physics

Talk Christian Schmeiser: Decay to equilibrium of diffusive and kinetic transport
The lecture was held within the of the Hausdorff Trimester Program: Kinetic Theory Abstract: Recent quantitative decay results for the solutions of linear Fokker-Planck and kinetic transport equations will be reviewed with an emphasis of the influence of confining potentials. For kinetic
From playlist Summer School: Trails in kinetic theory: foundational aspects and numerical methods

State Space to Transfer Function
In this video we show how to transform a linear state space representation of a dynamic system to an equivalent transfer function representation. We will derive the transformation of G(s) = C*(s*I-A)^-1*B+D. We will apply this to an example and show how to use Matlab’s various functions
From playlist Control Theory

Kaggle Reading Group: XLNet (Part 4) | Kaggle
This week we're continuing with XLNet: Generalized Autoregressive Pretraining for Language Understanding (Yang et al, unpublished). You can read the paper here: https://arxiv.org/abs/1906.08237 SUBSCRIBE: https://www.youtube.com/c/kaggle?sub_... About Kaggle: Kaggle is the world's large
From playlist Kaggle Reading Group | Kaggle

Apollonian circle packings via spectral methods - Hee Oh (Yale University)
notes for this talk: https://docs.google.com/viewer?url=http://www.msri.org/workshops/652/schedules/14556/documents/1680/assets/17222 Effective circle count for Apollonian circle packings, via spectral methods Hee Oh Brown University We will describe a recent effective counting result f
From playlist Number Theory
Instantons and Monopoles (Lecture 1) by Sergey Cherkis
Program: Quantum Fields, Geometry and Representation Theory ORGANIZERS : Aswin Balasubramanian, Saurav Bhaumik, Indranil Biswas, Abhijit Gadde, Rajesh Gopakumar and Mahan Mj DATE & TIME : 16 July 2018 to 27 July 2018 VENUE : Madhava Lecture Hall, ICTS, Bangalore The power of symmetries
From playlist Quantum Fields, Geometry and Representation Theory
Transfer Functions: Introduction and Implementation
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to use a transfer function to predict the output of system to a given input. Topics and time stamps: 0:38 – Example using an aircraft
From playlist Control Theory
The Step Response | Control Systems in Practice
Check out the other videos in this series: https://www.youtube.com/playlist?list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements f
From playlist Control Systems in Practice
Local eigenvalue statistics at the edge of the spectrum - Alexander Sodin
Alexander Sodin Princeton University December 5, 2013 We discuss two random decreasing sequences of continuous functions in two variables, and how they arise as the scaling limit from corners of a (real / complex) Wigner matrix undergoing stochastic evolution. The restriction of the second
From playlist Mathematics

SUSY for Strings and Branes, Part 3 - Melanie Becker
SUSY for Strings and Branes, Part 3 Melanie Becker Texas A&M University July 22, 2010
From playlist PiTP 2010

A Practical Introduction to Interpretations.
We give a definition that is necessary for the construction of Hodge Theaters.
From playlist Model Theory

Sparse distribution problems for some dynamical systems - Adam Kanigowski
Special Year Research Seminar Topic: Sparse distribution problems for some dynamical systems Speaker: Adam Kanigowski Affiliation: University of Maryland Date: October 04, 2022 Given a topological dynamical system (X,T) a bounded sequence (an) and f∈C(X) we are interested in the asymptot
From playlist Mathematics