
Data-Driven Control: The Goal of Balanced Model Reduction
In this lecture, we discuss the overarching goal of balanced model reduction: Identifying key states that are most jointly controllable and observable, to capture the most input—output energy. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning
Dynamics : An overview of the cause of mechanics
Dynamics is a subset of mechanics, which is the study of motion. Whereas kinetics studies that motion itself, dynamics is concerned about the CAUSES of motion. In particular, it involves the concepts of force, momentum and energy. This video gives an overview of what dynamics is, and is u
From playlist Dynamics

Machine Learning for Computational Fluid Dynamics
Machine learning is rapidly becoming a core technology for scientific computing, with numerous opportunities to advance the field of computational fluid dynamics. This paper highlights some of the areas of highest potential impact, including to accelerate direct numerical simulations, to i
From playlist Data Driven Fluid Dynamics

Data-Driven Control: Change of Variables in Control Systems
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify the most jointly controllable and observable states. https://www.eigensteve.com/
From playlist Data-Driven Control with Machine Learning
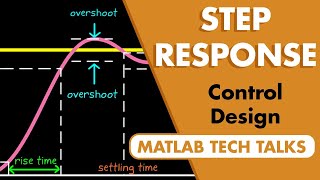
The Step Response | Control Systems in Practice
Check out the other videos in this series: https://www.youtube.com/playlist?list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements f
From playlist Control Systems in Practice
Determine when a particle's speed is increasing from a graph
Keywords 👉 Learn how to solve particle motion problems. Particle motion problems are usually modeled using functions. Now, when the function modeling the position of the particle is given with respect to the time, we find the speed function of the particle by differentiating the function
From playlist Determine Increasing or Decreasing Function From a Table

Accelerated motion and oscillation!
In this video i demonstrate accelerated motion with interface. I show the graphs of simple accelerating motion and simple harmonic motion with force and motion sensor!
From playlist MECHANICS

DDPS | Physics-Informed Learning for Nonlinear Dynamical Systems
Talk Abstract Dynamical modeling of a process is essential to study its dynamical behavior and perform engineering studies such as control and optimization. With the ease of accessibility of data, learning models directly from the data have recently drawn much attention. It is also desir
From playlist Data-driven Physical Simulations (DDPS) Seminar Series

From playlist CPB Theme 2

Natalia Tronko: Exact conservation laws for gyrokinetic Vlasov-Poisson equations
Find this video and other talks given by worldwide mathematicians on CIRM's Audiovisual Mathematics Library: http://library.cirm-math.fr. And discover all its functionalities: - Chapter markers and keywords to watch the parts of your choice in the video - Videos enriched with abstracts, b
From playlist SPECIAL 7th European congress of Mathematics Berlin 2016.

Deep Learning of Dynamics and Coordinates with SINDy Autoencoders
This video by Kathleen Champion describes a new approach for simultaneously discovering models and an effective coordinate system using a custom SINDy autoencoder. Paper at PNAS: https://www.pnas.org/content/116/45/22445.abstract Kathleen Champion, Bethany Lusch, J. Nathan Kutz, Steven L
From playlist Research Abstracts from Brunton Lab

Turbulence Closure Models: Reynolds Averaged Navier Stokes (RANS) & Large Eddy Simulations (LES)
Turbulent fluid dynamics are often too complex to model every detail. Instead, we tend to model bulk quantities and low-resolution approximations. To remain physical, these reduced approximations of the Navier-Stokes equations must be "closed", and turbulence closure modeling is one of t
From playlist Fluid Dynamics

HLCS | Interpretable and Explainable Data-Driven Methods for Physical Simulations
Description: A data-driven model can be built to accurately accelerate computationally expensive physical simulations, which is essential in multi-query problems, such as uncertainty quantification, design optimization, optimal control, and inverse problems. It is important to build interp
From playlist Hartree–Livermore Computational Science (HLCS)
Quantitative almost reducibility and its applications – Jiangong You – ICM2018
Dynamical Systems and Ordinary Differential Equations Invited Lecture 9.3 Quantitative almost reducibility and its applications Jiangong You Abstract: We survey the recent advances of almost reducibility and its applications in the spectral theory of one dimensional quasi-periodic Schröd
From playlist Dynamical Systems and ODE

Learning Optimal Control with Stochastic Models of Hamiltonian Dynamics for Shape & Function Optim.
Speaker: Chandrajit Bajaj (7/25/22) Abstract: Shape and Function Optimization can be achieved through Optimal Control over infinite-dimensional search space. All optimal control problems can be solved by first applying the Pontryagin maximum principle, and then computing a solution to the
From playlist Applied Geometry for Data Sciences 2022

Gene Golub's SIAM summer school, Matrix Equations and Model Reduction, Lecture 1
Gene Golub's SIAM summer school presents Matrix Equations and Model Reduction by Peter Benner; Lecture 1
From playlist Gene Golub SIAM Summer School Videos

Benjamin Anderson-Sackaney - Tracial and G-invariant States on Quantum Groups
For a discrete group G, the tracial states on its reduced group $C^*$-algebra $C^∗_r (G)$ are exactly the conjugation invariant states. This makes the traces on $C^∗_r (G)$ amenable to group dynamical techniques. In the setting of a discrete quantum group ${\mathbb G}$, there is a quantum
From playlist Annual meeting “Arbre de Noël du GDR Géométrie non-commutative”

MFEM Workshop 2022 | Reduced Order Modeling for FE Simulations with MFEM & libROM
The LLNL-led MFEM (Modular Finite Element Methods) project provides high-order mathematical calculations for large-scale scientific simulations. The project’s second community workshop was held on October 25, 2022, with participants around the world. Learn more about MFEM at https://mfem.o
From playlist MFEM Community Workshop 2022

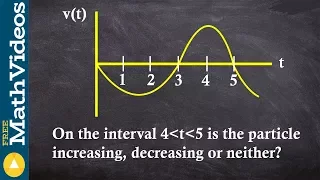
When is the particle increasing decreasing from a velocity graph
Keywords 👉 Learn how to solve particle motion problems. Particle motion problems are usually modeled using functions. Now, when the function modeling the position of the particle is given with respect to the time, we find the speed function of the particle by differentiating the function
From playlist Particle Motion Problems