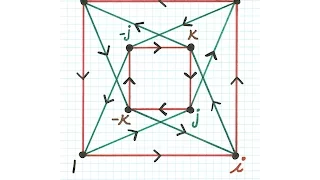
This is a video I have been wanting to make for some time, in which I discuss what the quaternions are, as mathematical objects, and how we do calculations with them. In particular, we will see how the fundamental equation of the quaternions i^2=j^2=k^2=ijk=-1 easily generates the rule for
From playlist Quaternions
quaternion square root of -1. We calculate the square root of -1 using the quaternions, which involves knowing how to multiply quaternion numbers. The answer will surprise you, because it involves spheres and it will make you see complex numbers in a new way, as north and south poles of ba
From playlist Complex Analysis
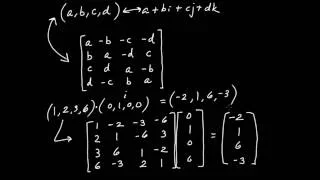
Quaternions as 4x4 Matrices - Connections to Linear Algebra
In math, it's usually possible to view an object or concept from many different (but equivalent) angles. In this video, we will see that the quaternions may be viewed as 4x4 real-valued matrices of a special form. What is interesting here is that if you know how to multiply matrices, you a
From playlist Quaternions

Matrix Theory: For the quaternion alpha = 1 - i + j - k, find the norm N(alpha) and alpha^{-1}. Then write alpha as a product of a length and a direction.
From playlist Matrix Theory
Computing Euler Angles: Tracking Attitude Using Quaternions
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Kinematical Equations and Poisson’s Kinematical Equations in that it consumes rate gyro information to compute Euler angles. However,
From playlist Flight Mechanics

Geometric Algebra - Rotors and Quaternions
In this video, we will take note of the even subalgebra of G(3), see that it is isomorphic to the quaternions and, in particular, the set of rotors, themselves in the even subalgebra, correspond to the set of unit quaternions. This brings the entire subject of quaternions under the heading
From playlist Math
Euler's Formula for the Quaternions
In this video, we will derive Euler's formula using a quaternion power, instead of a complex power, which will allow us to calculate quaternion exponentials such as e^(i+j+k). If you like quaternions, this is a pretty neat formula and a simple generalization of Euler's formula for complex
From playlist Math

3D Rotations in General: Rodrigues Rotation Formula and Quaternion Exponentials
In this video, we will discover how to rotate any vector through any axis by breaking up a vector into a parallel part and a perpendicular part. Then, we will use vector analysis (cross products and dot products) to derive the Rodrigues rotation formula and finish with a quaternion point o
From playlist Quaternions

OpenAI - Solving Rubik's Cube with a Robot Hand | RL paper explained
❤️ Become The AI Epiphany Patreon ❤️ ► https://www.patreon.com/theaiepiphany ▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬ In this video, I cover OpenAI's famous robotic hand that learned to solve the Rubik's cube by training purely in a simulation. ▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬ ✅ Paper: https://arxiv.org/abs/19
From playlist Reinforcement Learning
Quaternion algebras via their Mat2x2(F) representations
In this video we talk about general quaternion algebras over a field, their most important properties and how to think about them. The exponential map into unitary groups are covered. I emphasize the Hamiltionion quaternions and motivate their relation to the complex numbers. I conclude wi
From playlist Algebra

AGACSE2021 Soheil Sarabandi - The 4D nearest rotation matrix problem
The 4D nearest rotation matrix problem.
From playlist AGACSE2021

Groups with bounded generation: old and new - Andrei S. Rapinchuk
Joint IAS/Princeton University Number Theory Seminar Topic: Groups with bounded generation: old and new Speaker: Andrei S. Rapinchuk Date: May 06, 2021 For more video please visit http://video.ias.edu
From playlist Mathematics

Sonya Hanson - Pose estimation, temperature, noise, and biological temperature sensors via cryo-EM
Recorded 17 November 2022. Sonya Hanson of the Flatiron Institute presents "Better treatments of pose estimation, temperature, noise, and heterogeneity toward understanding biological temperature sensors via cryo-EM" at IPAM's Cryo-Electron Microscopy and Beyond Workshop. Abstract: With th
From playlist 2022 Cryo-Electron Microscopy and Beyond

Lecture 20: Space of Rotations, Regular Tessellations, Critical Surfaces, Binocular Stereo
MIT 6.801 Machine Vision, Fall 2020 Instructor: Berthold Horn View the complete course: https://ocw.mit.edu/6-801F20 YouTube Playlist: https://www.youtube.com/playlist?list=PLUl4u3cNGP63pfpS1gV5P9tDxxL_e4W8O In this lecture, we will transition from solving problems of absolute rotation (w
From playlist MIT 6.801 Machine Vision, Fall 2020

Effective height bounds for odd-degree totally real points on some curves - Levent Alpoge
Joint IAS/Princeton University Number Theory Seminar Topic: Effective height bounds for odd-degree totally real points on some curves Speaker: Levent Alpoge Affiliation: Columbia University Date: November 12, 2020 For more video please visit http://video.ias.edu
From playlist Mathematics
AI Weekly Update - April 12th, 2021 (#31!)
Thank you for watching! Please Subscribe! Content Links: MoCoV3: https://arxiv.org/pdf/2104.02057.pdf Revisiting Simple Neural Probabilistic Language Models: https://arxiv.org/pdf/2104.03474.pdf Large-scale forecasting: Self-supervised learning framework for hyperparameter tuning: https:/
From playlist AI Research Weekly Updates

Mathematics in Post-Quantum Cryptography II - Kristin Lauter
2018 Program for Women and Mathematics Topic: Mathematics in Post-Quantum Cryptography II Speaker: Kristin Lauter Affiliation: Microsoft Research Date: May 22, 2018 For more videos, please visit http://video.ias.edu
From playlist My Collaborators
Random Vectors, Random Matrices, Permuted Products, Permanents, and Diagrammatic Fun - Moore
Cris Moore Santa Fe Institute October 1, 2012 For more videos, visit http://video.ias.edu
From playlist Mathematics

Simplifying an expression using the sum of two angles for cosine
👉 Learn how to evaluate the cosine of an angle in radians using the sum/difference formulas. To do this, we first express the given angle as a sum or a difference of two (easy to evaluate) angles, then we use the unit circle and the Pythagoras theorem to identify the angles and obtain all
From playlist Sum and Difference Formulas

John Voight: Computing classical modular forms as orthogonal modular forms
Abstract: Birch gave an extremely efficient algorithm to compute a certain subspace of classical modular forms using the Hecke action on classes of ternary quadratic forms. We extend this method to compute all forms of non-square level using the spinor norm, and we exhibit an implementatio
From playlist Algebraic and Complex Geometry