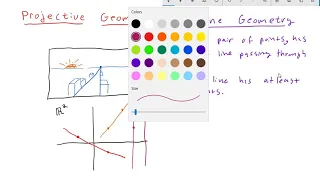
Introduction to Projective Geometry (Part 1)
The first video in a series on projective geometry. We discuss the motivation for studying projective planes, and list the axioms of affine planes.
From playlist Introduction to Projective Geometry
The circle and projective homogeneous coordinates | Universal Hyperbolic Geometry 7a | NJ Wildberger
Universal hyperbolic geometry is based on projective geometry. This video introduces this important subject, which these days is sadly absent from most undergrad/college curriculums. We adopt the 19th century view of a projective space as the space of one-dimensional subspaces of an affine
From playlist Universal Hyperbolic Geometry

The circle and projective homogeneous coordinates (cont.) | Universal Hyperbolic Geometry 7b
Universal hyperbolic geometry is based on projective geometry. This video introduces this important subject, which these days is sadly absent from most undergrad/college curriculums. We adopt the 19th century view of a projective space as the space of one-dimensional subspaces of an affine
From playlist Universal Hyperbolic Geometry
algebraic geometry 15 Projective space
This lecture is part of an online algebraic geometry course, based on chapter I of "Algebraic geometry" by Hartshorne. It introduces projective space and describes the synthetic and analytic approaches to projective geometry
From playlist Algebraic geometry I: Varieties
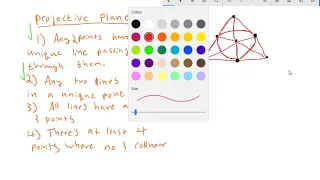
Introduction to Projective Geometry (Part 2)
The second video in a series about projective geometry. We list the axioms for projective planes, give an examle of a projective plane with finitely many points, and define the real projective plane.
From playlist Introduction to Projective Geometry
Algebraic structure on the Euclidean projective line | Rational Geometry Math Foundations 137
In this video we look at some pleasant consequences of imposing a Euclidean structure on the projective line. We give a proof of the fundamental projective Triple quad formula, talk about the equal p-quadrances theorem, and see how the logistic map of chaos theory makes its appearance as t
From playlist Math Foundations

Projective view of conics and quadrics | Differential Geometry 9 | NJ Wildberger
In this video we introduce projective geometry into the study of conics and quadrics. Our point of view follows Mobius and Plucker: the projective plane is considered as the space of one-dimensional subspaces of a three dimensional vector space, or in other words lines through the origin.
From playlist Differential Geometry

In this video, I define "inertial reference frame," "non-inertial reference frame," and "inertial force."
From playlist Intermediate Classical Mechanics

The projective Quadruple quad formula | Rational Geometry Math Foundations 148 | NJ Wildberger
In this video we introduce the projective version of the Quadruple quad formula, which not only controls the relationship between four projective points, but has a surprising connection with the geometry of the cyclic quadrilateral. The projective quadruple quad function is called R(a,b,
From playlist Math Foundations

Live CEOing Ep 645: Language Design Review of Astronomy, Geography & More Continued
In this episode of Live CEOing, Stephen Wolfram discusses upcoming improvements and features to the Wolfram Language. If you'd like to contribute to the discussion in future episodes, you can participate through this YouTube channel or through the official Twitch channel of Stephen Wolfram
From playlist Behind the Scenes in Real-Life Software Design

Highlight: Adding iframes to the streamer so they can last longer
Brooks changed the way that iframes work in the Get the Streamer game! Now the streamer gets more iframes at the beginning of the game and the number of them goes down the longer the game goes on. This way the streamer has a better chance at lasting longer into the game. --- Code - [http
From playlist programming before work live streams

Seminar on Applied Geometry and Algebra (SIAM SAGA): Dustin Mixon
Title: Packing Points in Projective Spaces Speaker: Dustin Mixon Date: Tuesday, March 8, 2022 at 11:00am Eastern Abstract: Given a compact metric space, it is natural to ask how to arrange a given number of points so that the minimum distance is maximized. For example, the setting of the
From playlist Seminar on Applied Geometry and Algebra (SIAM SAGA)

Using a Homogeneous Transformation Matrix to Combine Rotation and Translation
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a standard rotation matrix with a translation. This matrix can be used to relate the pose of a system
From playlist Flight Mechanics


Franz Luef: Noncommutative geometry and time-frequency analysis
Find this video and other talks given by worldwide mathematicians on CIRM's Audiovisual Mathematics Library: http://library.cirm-math.fr. And discover all its functionalities: - Chapter markers and keywords to watch the parts of your choice in the video - Videos enriched with abstracts, b
From playlist 30 years of wavelets

Live CEOing Ep 601: Language Design Review of Astronomy
In this episode of Live CEOing, Stephen Wolfram discusses upcoming improvements and features to the Wolfram Language. If you'd like to contribute to the discussion in future episodes, you can participate through this YouTube channel or through the official Twitch channel of Stephen Wolfram
From playlist Behind the Scenes in Real-Life Software Design

Implementing DeepMind's DQN from scratch! | Project Update
❤️ Become The AI Epiphany Patreon ❤️ ► https://www.patreon.com/theaiepiphany ▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬ I walk you through my project (it's still not working - RL of course it's not working!) and explain to you my workflow, how I think, organize my project, todos, etc. ▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬▬
From playlist Reinforcement Learning

How To Create A Video For Data Science Website Using Fusion | Session 02 | #design
Don’t forget to subscribe! In this project series, you will learn to create a video for a data science website using Fusion. This small course has the main goal to teach you how to use a node-based video editor Fusion from the Blackmagic Design team to create abstract video backgrounds
From playlist Create A Video For Data Science Website Using Fusion

This is an introductory video to working with GeoPandas, using data pulled from Washing DC's Open Data page. We'll combine neighborhood polygons with construction permit point data to get permits per neighborhood per year, and create plots and maps with our results. Notebook in Githu
From playlist Introduction to GeoPandas

Isometry groups of the projective line (I) | Rational Geometry Math Foundations 138 | NJ Wildberger
The projective line can be given a Euclidean structure, just as the affine line can, but it is a bit more complicated. The algebraic structure of this projective line supports some symmetries. Symmetry in mathematics is often most efficiently encoded with the idea of a group--a technical t
From playlist Math Foundations