Orthogonal convex hull
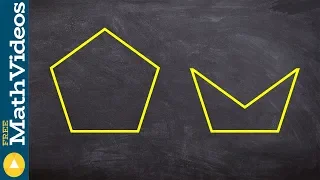
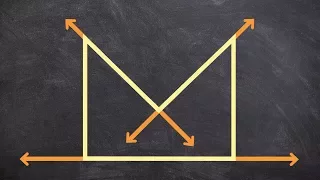
In geometry, a set K ⊂ Rd is defined to be orthogonally convex if, for every line L that is parallel to one of standard basis vectors, the intersection of K with L is empty, a point, or a single segment. The term "orthogonal" refers to corresponding Cartesian basis and coordinates in Euclidean space, where different basis vectors are perpendicular, as well as corresponding lines. Unlike ordinary convex sets, an orthogonally convex set is not necessarily connected. The orthogonal convex hull of a set K ⊂ Rd is the intersection of all connected orthogonally convex supersets of K. These definitions are made by analogy with the classical theory of convexity, in which K is convex if, for every line L, the intersection of K with L is empty, a point, or a single segment. Orthogonal convexity restricts the lines for which this property is required to hold, so every convex set is orthogonally convex but not vice versa. For the same reason, the orthogonal convex hull itself is a subset of the convex hull of the same point set. A point p belongs to the orthogonal convex hull of K if and only if each of the closed axis-aligned orthants having p as apex has a nonempty intersection with K. The orthogonal convex hull is also known as the rectilinear convex hull, or, in two dimensions, the x-y convex hull. (Wikipedia).