
Ex: Find the Max and Min of an Objective Function Given the Feasible Region Using Linear Programming
This video explains how to find the max and min of an objective function given the graph of the feasible region. Site: http://mathispower4.com
From playlist Linear Programming

How to find the position function given the acceleration function
👉 Learn how to approximate the integral of a function using the Reimann sum approximation. Reimann sum is an approximation of the area under a curve or between two curves by dividing it into multiple simple shapes like rectangles and trapezoids. In using the Reimann sum to approximate the
From playlist Riemann Sum Approximation
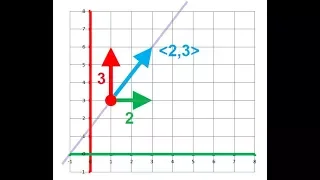
Linear functions -- Elementary Linear Algebra
This lecture is on Elementary Linear Algebra. For more see http://calculus123.com.
From playlist Elementary Linear Algebra

How to use the LCD to help us solve a rational equation
👉 Learn how to solve proportions. Two ratios are said to be proportional when the two ratios are equal. Thus, proportion problems are problems involving the equality of two ratios. When given a proportion problem with an unknown, we usually cross-multiply the two ratios and then solve for
From playlist How to Solve Rational Equations

Evaluate the limit of a rational expression by applying direct substitution
👉 Learn all about the Limit. In this playlist, we will explore how to evaluate the limit of an equation, piecewise function, table and graph. We will explore continuity as well as discontinuities such as holes, asymptotes and jumps and how they relate to the limit. We will evaluate the g
From playlist Evaluate Limits of Rational Expressions
Learn how to find the position function given the velocity and acceleration, parti
👉 Learn how to approximate the integral of a function using the Reimann sum approximation. Reimann sum is an approximation of the area under a curve or between two curves by dividing it into multiple simple shapes like rectangles and trapezoids. In using the Reimann sum to approximate the
From playlist Riemann Sum Approximation

Left hand Limit of a rational function at a hole
👉 Learn all about the Limit. In this playlist, we will explore how to evaluate the limit of an equation, piecewise function, table and graph. We will explore continuity as well as discontinuities such as holes, asymptotes and jumps and how they relate to the limit. We will evaluate the g
From playlist Evaluate Limits of Rational Expressions

Ex: Find the Maximum of an Objective Function Given Constraints Using Linear Programming (bounded)
This video explains how to find the max of an objective function given constraints. The feasible region is bounded. Site: http://mathispower4u.com
From playlist Linear Programming

Lieven Vandenberghe: "Bregman proximal methods for semidefinite optimization."
Intersections between Control, Learning and Optimization 2020 "Bregman proximal methods for semidefinite optimization." Lieven Vandenberghe - University of California, Los Angeles (UCLA) Abstract: We discuss first-order methods for semidefinite optimization, based on non-Euclidean projec
From playlist Intersections between Control, Learning and Optimization 2020

Suvrit Sra: Lecture series on Aspects of Convex, Nonconvex, and Geometric Optimization (Lecture 2)
The lecture was held within the framework of the Hausdorff Trimester Program "Mathematics of Signal Processing". (26.1.2016)
From playlist HIM Lectures: Trimester Program "Mathematics of Signal Processing"
Fellow Short Talks: Dr Peter Richtarik, Edinburgh University
Peter Richtarik is a Reader in the School of Mathematics at the University of Edinburgh, and is the Head of a Big Data Optimization Lab. He received his PhD from Cornell University in 2007, and currently holds an EPSRC Early Career Fellowship in Mathematical Sciences. RESEARCH My main re
From playlist Short Talks
Arthur Krener: "Al'brekht’s Method in Infinite Dimensions"
High Dimensional Hamilton-Jacobi PDEs 2020 Workshop I: High Dimensional Hamilton-Jacobi Methods in Control and Differential Games "Al'brekht’s Method in Infinite Dimensions" Arthur Krener, Naval Postgraduate School Abstract: Al'brekht's method is a way optimally stabilize a finite dimens
From playlist High Dimensional Hamilton-Jacobi PDEs 2020

Priya Donti - Optimization-in-the-loop AI for energy and climate - IPAM at UCLA
Recorded 28 February 2023. Priya Donti of Cornell University presents "Optimization-in-the-loop AI for energy and climate" at IPAM's Artificial Intelligence and Discrete Optimization Workshop. Abstract: Addressing climate change will require concerted action across society, including the d
From playlist 2023 Artificial Intelligence and Discrete Optimization

HLCS | Interpretable and Explainable Data-Driven Methods for Physical Simulations
Description: A data-driven model can be built to accurately accelerate computationally expensive physical simulations, which is essential in multi-query problems, such as uncertainty quantification, design optimization, optimal control, and inverse problems. It is important to build interp
From playlist Hartree–Livermore Computational Science (HLCS)

DDPS | libROM: Library for physics-constrained data-driven physical simulations | Youngsoo Choi
A data-driven model can be built to accurately accelerate computationally expensive physical simulations, which is essential in multi-query problems, such as inverse problem, uncertainty quantification, design optimization, and optimal control. In this talk, two types of data-driven mode
From playlist Data-driven Physical Simulations (DDPS) Seminar Series

DDPS | Physics-Informed Learning for Nonlinear Dynamical Systems
Talk Abstract Dynamical modeling of a process is essential to study its dynamical behavior and perform engineering studies such as control and optimization. With the ease of accessibility of data, learning models directly from the data have recently drawn much attention. It is also desir
From playlist Data-driven Physical Simulations (DDPS) Seminar Series

Mod-01 Lec-19 Linear Least Square Estimation and Geometric Interpretation
Advanced Numerical Analysis by Prof. Sachin C. Patwardhan,Department of Chemical Engineering,IIT Bombay.For more details on NPTEL visit http://nptel.ac.in
From playlist IIT Bombay: Advanced Numerical Analysis | CosmoLearning.org

Evaluating the limit at infinity find horizontal asymptote
👉 We will explore how to evaluate the limit at infinity. When evaluating the limit at infinity or negative infinity we are interested to know where is the graph going right and left. This is also commonly explored as end behavior of the graph. Most of the examples we will look at will incl
From playlist Evaluate the Limit..........Help!

Unit 5 - pareto optimal allocations part 3
From playlist Courses and Series

DDPS | Model reduction with adaptive enrichment for large scale PDE constrained optimization
Talk Abstract Projection based model order reduction has become a mature technique for simulation of large classes of parameterized systems. However, several challenges remain for problems where the solution manifold of the parameterized system cannot be well approximated by linear subspa
From playlist Data-driven Physical Simulations (DDPS) Seminar Series