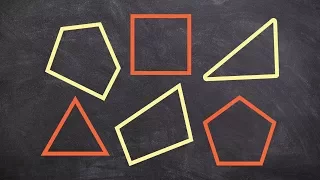
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between a regular and irregular polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
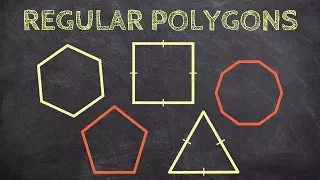
What is the definition of a regular polygon and how do you find the interior angles
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What are four types of polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

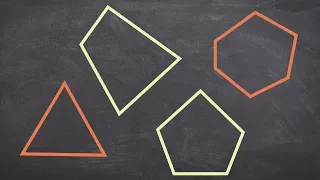
What are the names of different types of polygons based on the number of sides
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Raman Sanyal: Polyhedral geometry of pivot rules
Geometrically, a linear program gives rise to a polyhedron together with an orientation of its graph. A simplex method selects a path from any given vertex to the sink and thus determines an arborescence. The centerpiece of any simplex method is the pivot rule that selects the outgoing edg
From playlist Workshop: Tropical geometry and the geometry of linear programming

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Steffen Borgwardt: The role of partition polytopes in data analysis
The field of optimization, and polyhedral theory in particular, provides a powerful point of view on common tasks in data analysis. In this talk, we highlight the role of the so-called partition polytopes and their studies in clustering and classification. The geometric properties of parti
From playlist Workshop: Tropical geometry and the geometry of linear programming

Maria Angelica Cueto - "Implicitization of surfaces via geometric tropicalization"
Implicitization of surfaces via geometric tropicalization - Research lecture at the Worldwide Center of Mathematics.
From playlist Center of Math Research: the Worldwide Lecture Seminar Series

What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Daniel Dadush: Probabilistic analysis of the simpler method and polytope diameter
In this talk, I will overview progress in our probabilistic understanding of the (shadow vertex) simplex method in three different settings: smoothed polytopes (whose data is randomly perturbed), well-conditioned polytopes (e.g., TU systems), and random polytopes with constraints drawn uni
From playlist Workshop: Tropical geometry and the geometry of linear programming

Nonlinear algebra, Lecture 7: "Toric Varieties", by Mateusz Michalek
This is the seventh lecture in the IMPRS Ringvorlesung, the advanced graduate course at the Max Planck Institute for Mathematics in the Sciences.
From playlist IMPRS Ringvorlesung - Introduction to Nonlinear Algebra
Connecting tropical intersection theory with polytope algebra in types A and B by Alex Fink
PROGRAM COMBINATORIAL ALGEBRAIC GEOMETRY: TROPICAL AND REAL (HYBRID) ORGANIZERS Arvind Ayyer (IISc, India), Madhusudan Manjunath (IITB, India) and Pranav Pandit (ICTS-TIFR, India) DATE & TIME: 27 June 2022 to 08 July 2022 VENUE: Madhava Lecture Hall and Online Algebraic geometry is t
From playlist Combinatorial Algebraic Geometry: Tropical and Real (HYBRID)

Guido Montúfar : Fisher information metric of the conditional probability politopes
Recording during the thematic meeting : "Geometrical and Topological Structures of Information" the September 01, 2017 at the Centre International de Rencontres Mathématiques (Marseille, France) Filmmaker: Guillaume Hennenfent
From playlist Geometry

Tropical Geometry - Lecture 12 - Geometric Tropicalization | Bernd Sturmfels
Twelve lectures on Tropical Geometry by Bernd Sturmfels (Max Planck Institute for Mathematics in the Sciences | Leipzig, Germany) We recommend supplementing these lectures by reading the book "Introduction to Tropical Geometry" (Maclagan, Sturmfels - 2015 - American Mathematical Society)
From playlist Twelve Lectures on Tropical Geometry by Bernd Sturmfels
Jonas Witt: Dantzig Wolfe Reformulations for the Stable Set Problem
Dantzig-Wolfe reformulation of an integer program convexifies a subset of the constraints, which yields an extended formulation with a potentially stronger linear programming (LP) relaxation than the original formulation. This paper is part of an endeavor to understand the strength of such
From playlist HIM Lectures: Trimester Program "Combinatorial Optimization"

Zakhar Kabluchko: Random Polytopes, Lecture III
In these three lectures we will provide an introduction to the subject of beta polytopes. These are random polytopes defined as convex hulls of i.i.d. samples from the beta density proportional to (1 − ∥x∥2)β on the d-dimensional unit ball. Similarly, beta’ polytopes are defined as convex
From playlist Workshop: High dimensional spatial random systems

Classifying a polygon in two different ways ex 4
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons