
(8.1.1) Systems of Autonomous Nonlinear Differential Equations and Phase Plane Analysis
This video defines autonomous systems of differential equations, how to analyze phase portraits and determine the equilibrium solutions. https://mathispower4u.com
From playlist Differential Equations: Complete Set of Course Videos

In this section I introduce plane autonomous systems, which form beautiful and useful vector fields.
From playlist A Second Course in Differential Equations
Lec 31 | MIT 18.03 Differential Equations, Spring 2006
Non-linear Autonomous Systems: Finding the Critical Points and Sketching Trajectories; the Non-linear Pendulum. View the complete course: http://ocw.mit.edu/18-03S06 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT 18.03SC Differential Equations, Fall 2011

B19 Example problem of a system of autonomous equations
Solving a system of ordinary differential equation, that are autonomous and represent a vector field in a plane.
From playlist A Second Course in Differential Equations
What Are Non-Minimum Phase Systems? | Control Systems in Practice
Check out the other videos in the series: Part 1 - What Does a Controls Engineer Do? https://youtu.be/ApMz1-MK9IQ Part 2 - What Is Gain Scheduling? https://youtu.be/YiUjAV1bhKs Part 3 - What Is Feedforward Control? https://youtu.be/FW_ay7K4jPE Part 4 - Why Time Delay Matters https://youtu.
From playlist Control Systems in Practice
Differential Equations | Undetermined Coefficients for a System of DEs
We use the method of undetermined coefficients to solve a nonhomogeneous system of first order linear differential equations. http://www.michael-penn.net http://www.randolphcollege.edu/mathematics/
From playlist Systems of Differential Equations
Differential Equations | Variation of Parameters for a System of DEs
We solve a nonhomogeneous system of linear differential equations using the method of variation of parameters. http://www.michael-penn.net http://www.randolphcollege.edu/mathematics/
From playlist Systems of Differential Equations

Aneta Stefanovska - Time: How it matters - IPAM at UCLA
Recorded 31 August 2022. Aneta Stefanovska of Lancaster University presents "Time: How it matters?" at IPAM's Reconstructing Network Dynamics from Data: Applications to Neuroscience and Beyond. Abstract: The simplest definition of dynamics is the evolution of position in time and space. Fo
From playlist 2022 Reconstructing Network Dynamics from Data: Applications to Neuroscience and Beyond
23 Algebraic system isomorphism
Isomorphic algebraic systems are systems in which there is a mapping from one to the other that is a one-to-one correspondence, with all relations and operations preserved in the correspondence.
From playlist Abstract algebra

Nonautonomous and Random Dynamical Systems Into the Climate Sciences - Ghil -Workshop 1 -CEB T3 2019
Ghil (ENS, Paris, and UCLA) / 09.10.2019 Nonautonomous and Random Dynamical Systems Into the Climate Sciences H. Poincaré already raised doubts about the predictability of weather due to the divergence of orbits of dynamical systems associated more recently with chaos. Progress in th
From playlist 2019 - T3 - The Mathematics of Climate and the Environment
Simple Examples of Rate and Bifurcation Tipping by Sebastian Wieczorek
PROGRAM TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID) ORGANIZERS: Partha Sharathi Dutta (IIT Ropar, India), Vishwesha Guttal (IISc, India), Mohit Kumar Jolly (IISc, India) and Sudipta Kumar Sinha (IIT Ropar, India) DATE: 19 September 2022 to 30 September 2022 VENUE: Ramanujan Lecture Hall an
From playlist TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID, 2022)

Benjamin Seibold: "Basic Traffic Models and Traffic Waves" (Part 2/2)
Watch part 1/2 here: https://youtu.be/9_1cEtimRNE Mathematical Challenges and Opportunities for Autonomous Vehicles Tutorials 2020 "Basic Traffic Models and Traffic Waves" (Part 2/2) Benjamin Seibold - Temple University Institute for Pure and Applied Mathematics, UCLA September 17, 2020
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020

Rate-Induced Tipping in Asymptotically Autonomous Dynamical Systems: Theory.. by Sebastian Wieczorek
PROGRAM TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID) ORGANIZERS: Partha Sharathi Dutta (IIT Ropar, India), Vishwesha Guttal (IISc, India), Mohit Kumar Jolly (IISc, India) and Sudipta Kumar Sinha (IIT Ropar, India) DATE: 19 September 2022 to 30 September 2022 VENUE: Ramanujan Lecture Hall an
From playlist TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID, 2022)

Discrete-Time Dynamical Systems
This video shows how discrete-time dynamical systems may be induced from continuous-time systems. https://www.eigensteve.com/
From playlist Data-Driven Dynamical Systems
Aaron Ames: "Safety-Critical Control of Autonomous Systems"
Mathematical Challenges and Opportunities for Autonomous Vehicles 2020 Workshop II: Safe Operation of Connected and Autonomous Vehicle Fleets "Safety-Critical Control of Autonomous Systems" Aaron Ames - California Institute of Technology Abstract: Guaranteeing safe behavior is a critical
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020

Paola Goatin: "Macroscopic models for Autonomous Vehicles"
Mathematical Challenges and Opportunities for Autonomous Vehicles Tutorials 2020 "Macroscopic models for Autonomous Vehicles" Paola Goatin - Inria Sophia Antipolis-Méditerranée Abstract: My lecture will give an introduction to macroscopic traffic flow models (first and second order), the
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020
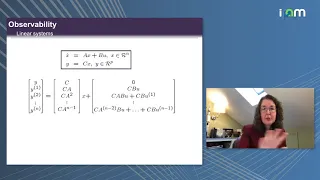
Kristi Morgansen: "Analytical & Empirical Tools for Nonlinear Network Observability in Autonomou..."
Mathematical Challenges and Opportunities for Autonomous Vehicles 2020 Workshop IV: Social Dynamics beyond Vehicle Autonomy "Analytical and Empirical Tools for Nonlinear Network Observability in Autonomous Systems" Kristi Morgansen - University of Washington Abstract: A fundamental eleme
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020

Benedetto Piccoli: "Social dynamics, control of large groups and vehicular traffic"
Mathematical Challenges and Opportunities for Autonomous Vehicles 2020 Workshop IV: Social Dynamics beyond Vehicle Autonomy "Social dynamics, control of large groups and vehicular traffic" Benedetto Piccoli - Rutgers University Abstract: We revise come recent approach to model social dyn
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020

Spring Berman: "Techniques & Testbeds for Integrating Human Control at Multiple Scales in Distri..."
Mathematical Challenges and Opportunities for Autonomous Vehicles 2020 Workshop IV: Social Dynamics beyond Vehicle Autonomy "Techniques and Testbeds for Integrating Human Control at Multiple Scales in Distributed Robotic Systems" Spring Berman - Arizona State University Institute for Pur
From playlist Mathematical Challenges and Opportunities for Autonomous Vehicles 2020

A14 Nonhomegeneous linear systems solved by undetermined coefficients
There are two methods for solving nonhomogeneous systems. The first uses undetermined coefficients.
From playlist A Second Course in Differential Equations