
Accelerated motion and oscillation!
In this video i demonstrate accelerated motion with interface. I show the graphs of simple accelerating motion and simple harmonic motion with force and motion sensor!
From playlist MECHANICS
Fuzzy control of inverted pendulum
Fuzzy control of inverted pendulum, State-feedback controller is designed based on T-S fuzzy model with the consideration of system stability and performance.
From playlist Demonstrations

AWESOME Simple harmonic motion!
In this video show simple harmonic motion on spring and pendulums, used position sensor.
From playlist MECHANICS
Dynamics : An overview of the cause of mechanics
Dynamics is a subset of mechanics, which is the study of motion. Whereas kinetics studies that motion itself, dynamics is concerned about the CAUSES of motion. In particular, it involves the concepts of force, momentum and energy. This video gives an overview of what dynamics is, and is u
From playlist Dynamics

It is a design of Goddard Space Flight Center, USA. The position and orientation of the orange platform is governed uniquely, in all six degrees of freedom, by the positions of the drivers on the base plate. The lower ends of the violet limbs are connected via universal joints (2 DoF) to
From playlist Mechanisms
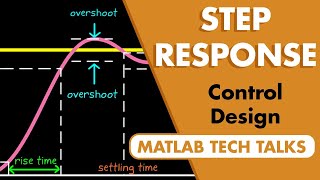
The Step Response | Control Systems in Practice
Check out the other videos in this series: https://www.youtube.com/playlist?list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b This video covers a few interesting things about the step response. We’ll look at what a step response is and some of the ways it can be used to specify design requirements f
From playlist Control Systems in Practice

An animation I put together of a helicopter flying through a mountain range. I did not create the mountain background animation.
From playlist Motion Design Portfolio

Fuzzy control of inverted pendulum,
Fuzzy control of inverted pendulum, State-feedback controller is designed based on T-S fuzzy model with the consideration of system stability and performance. Details can be found in https://nms.kcl.ac.uk/hk.lam/HKLam/index.php/demonstrations
From playlist Demonstrations

Position control of two-wheelded mobile robot using a P controller Details can be found in https://nms.kcl.ac.uk/hk.lam/HKLam/index.php/demonstrations
From playlist Demonstrations

Lecture 16 | Introduction to Robotics
Lecture by Professor Oussama Khatib for Introduction to Robotics (CS223A) in the Stanford Computer Science Department. For the last meeting of the quarter, Professor Khatib shows a short video on PUMA robots demonstrating compliant motion and force control, lectures on Compliance, and show
From playlist Lecture Collection | Introduction to Robotics

GoGaRuCo 2012 - RubyMotion: Rubyizing iOS development
RubyMotion: Rubyizing iOS development by: Amit Kumar RubyMotion has revolutionized native app development for iOS devices. I would like to share some best practices/lessons learned building apps using RubyMotion. These include: IDE Support REPL Using external Ruby libraries and gems Usin
From playlist gogaruco 2012

Modeling and Simulation of Walking Robots
Join Sebastian Castro as he outlines a simulation-based workflow for modeling and controlling a bipedal walking robot using Simscape™ and Simscape Multibody™. First, you will learn how to model the rigid-body mechanics of a walking robot using Simscape Multibody. You can use MATLAB® varia
From playlist Modeling, Simulation and Control: MATLAB and Simulink Robotics Arena

Building iOS Apps with RubyMotion by Ray Hightower
Help us caption & translate this video! http://amara.org/v/FGfk/
From playlist Aloha RubyConf 2012

Lecture 13 | Introduction to Robotics
Lecture by Professor Oussama Khatib for Introduction to Robotics (CS223A) in the Stanford Computer Science Department. Professor Khatib shows a short video on Juggling Robots, then lectures on robotics control. CS223A is an introduction to robotics which covers topics such as Spatial De
From playlist Lecture Collection | Introduction to Robotics

Lecture 1 | Introduction to Robotics
Help us caption and translate this video on Amara.org: http://www.amara.org/en/v/mg/ Lecture by Professor Oussama Khatib for Introduction to Robotics (CS223A) in the Stanford Computer Science Department. In the first lecture of the quarter, Professor Khatib provides an overview of the cou
From playlist Lecture Collection | Introduction to Robotics

Stanford Seminar - Thesis Defense: Designing in-situ Interaction with Ubiquitous Robots
Lawrence Kim Stanford University January 31, 2020 As robots begin to operate in our personal space and collaborate with us, it is important to investigate how to implement seamless integration of robots to assist humans in every aspect of life. Swarms of cm-scale non-anthropomorphic robot
From playlist Stanford Seminars
mod-10 lec-10 Hydraulic Servomechanism and Servo and Proportional Control Valves
Fundamentals of Industrial Oil Hydraulics and Pneumatics by Prof. R.N. Maiti,Department of Mechanical Engineering,IIT Kharagpur.For more details on NPTEL visit http://nptel.ac.in
From playlist IIT Kharagpur: Fundamentals of Industrial Oil Hydraulics and Pneumatics (CosmoLearning Mechanical Engineering)

Rails Conf 2013 TDDing iOS Apps for fun and profit with RubyMotion
By Brian Sam-Bodden As Ruby Developer I've had a pretty involved relationship with my Mac. I own iPads and iPhones since Apple started to make them. A few years back I told myself I was going to build apps for the Mac/iPhone/iPad but then reality sunk in when I started learning Objective-
From playlist Rails Conf 2013

Equations of Motion for a Planar Vehicle
In this video we outline equations of motion for a simple planar vehicle. This model is suitable for vehicles such as boats or hovercraft that that are restricted to move in a 2D plane but can rotate about a single axis. We derive equations of motion for the vehicle and implement the mod
From playlist Control Theory

Walking Robot Pattern Generation
Join Sebastian Castro and Carlos Santacruz-Rosero as they discuss the foundations of model-based walking control design for legged humanoid robots. These include the simplified linear inverted pendulum model and the concept of zero-moment point (ZMP). - Model Predictive Control Toolbox:
From playlist Modeling, Simulation and Control: MATLAB and Simulink Robotics Arena