Generalized Wiener filter
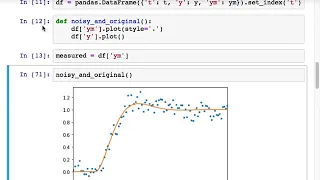
The Wiener filter as originally proposed by Norbert Wiener is a signal processing filter which uses knowledge of the statistical properties of both the signal and the noise to reconstruct an optimal estimate of the signal from a noisy one-dimensional time-ordered data stream. The generalized Wiener filter generalizes the same idea beyond the domain of one-dimensional time-ordered signal processing, with two-dimensional image processing being the most common application. (Wikipedia).