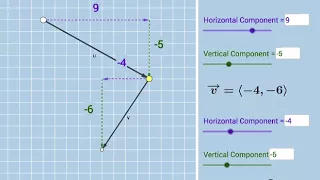
Adding Vectors Geometrically: Dynamic Illustration
Link: https://www.geogebra.org/m/tsBer5An
From playlist Trigonometry: Dynamic Interactives!

Dynamic Random Access Memory (DRAM). Part 3: Binary Decoders
This is the third in a series of computer science videos is about the fundamental principles of Dynamic Random Access Memory, DRAM, and the essential concepts of DRAM operation. This video covers the role of the row address decoder and the workings of generic binary decoders. It also expl
From playlist Random Access Memory
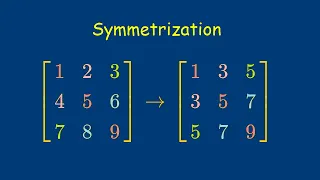
In this video, I define a cool operation called the symmetrization, which turns any matrix into a symmetric matrix. Along the way, I also explain how to show that an (abstract) linear transformation is one-to-one and onto. Finally, I show how to decompose and matrix in a nice way, sort of
From playlist Linear Transformations
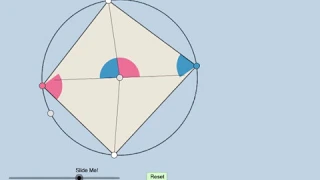
Cyclic Quadrilateral: Proof Hint!
Link: https://www.geogebra.org/m/KYdypjws
From playlist Geometry: Dynamic Interactives!

Projection of One Vector onto Another Vector
Link: https://www.geogebra.org/m/wjG2RjjZ
From playlist Trigonometry: Dynamic Interactives!
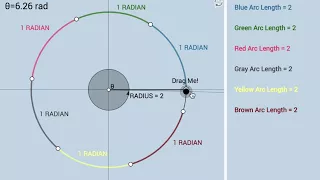
Radian Definition: Dynamic & Conceptual Illustrator
Link: https://www.geogebra.org/m/VYq5gSqU
From playlist Trigonometry: Dynamic Interactives!

Discrete-Time Dynamical Systems
This video shows how discrete-time dynamical systems may be induced from continuous-time systems. https://www.eigensteve.com/
From playlist Data-Driven Dynamical Systems

Composing Trig & Inverse Trig Functions (1)
Create a #GeoGebra lesson out of https://www.geogebra.org/m/byevwtd8 , have remote & in-class Ss join, & observe everyone’s thinking in real time! Here, evaluating compositions of #trig & inverse trig functions: https://www.geogebra.org/m/ezkfbxsu
From playlist Trigonometry: Dynamic Interactives!
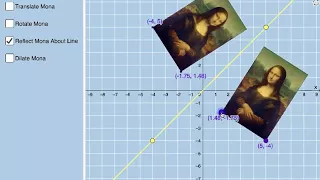
Messing with Mona: Introduction to Geometric Transformations
Link: https://www.geogebra.org/m/KFtdRvyv
From playlist Geometry: Dynamic Interactives!
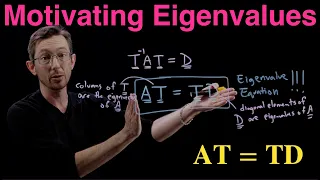
Motivating Eigenvalues and Eigenvectors with Differential Equations
This video *derives* the eigenvalues and eigenvectors of a matrix "A" to solve the matrix system of equations dx/dt = A*x. Playlist: https://www.youtube.com/playlist?list=PLMrJAkhIeNNTYaOnVI3QpH7jgULnAmvPA Course Website: http://faculty.washington.edu/sbrunton/me564/ @eigensteve on Tw
From playlist Engineering Math: Differential Equations and Dynamical Systems

Lecture 15 | Introduction to Robotics
Lecture by Professor Oussama Khatib for Introduction to Robotics (CS223A) in the Stanford Computer Science Department. Professor Khatib shows a short video about On the Run: The Leg Laboratory, then continues to lecture on Control. CS223A is an introduction to robotics which covers topi
From playlist Lecture Collection | Introduction to Robotics
Professor Mike West: Structured Dynamic Graphical Models & Scaling Multivariate Time Series
The Turing Lectures - Professor Mike West: Structured Dynamic Graphical Models & Scaling Multivariate Time Series. Click the below timestamps to navigate the video. 00:00:12 Welcome & Introduction by Doctor Ioanna Manolopoulou 00:01:19 Professor Mike West: Structured Dynamic
From playlist Turing Lectures

Motor Control Design with MATLAB and Simulink
Learn about motor control design using MATLAB® and Simulink®. In this video, you will learn to: - Identify core pieces of a field-oriented controller in a Simulink model. - Autotune of PI controller gains. - Distinguish between dynamic decoupling control and flux weakening control. Down
From playlist Hybrid Electric Vehicles

The Ecology and Evolution of Microbiomes by Akshit Goyal
COLLOQUIUM : THE ECOLOGY AND EVOLUTION OF MICROBIOMES SPEAKER : Akshit Goyal (Massachusetts Institute of Technology, USA) DATE & TIME : Mon, 04 April 2022, 14:00 to 15:30 VENUE : Online and Emmy Noether Seminar Room RESOURCES ABSTRACT Microbes are ubiquitous on Earth and dwell in dive
From playlist ICTS Colloquia
Stochastic Approach to Non-Equilibrium Quantum Spin Systems by Joe Bhaseen
PROGRAM NON-HERMITIAN PHYSICS - PHHQP XVIII DATE :04 June 2018 to 13 June 2018 VENUE:Ramanujan Lecture Hall, ICTS Bangalore Non-Hermitian Physics-"Pseudo-Hermitian Hamiltonians in Quantum Physics (PHHQP) XVIII" is the 18th meeting in the series that is being held over the years in Qua
From playlist Non-Hermitian Physics - PHHQP XVIII

Lec 11 | MIT Finite Element Procedures for Solids and Structures, Linear Analysis
Lecture 11: Mode superposition analysis; time history Instructor: Klaus-Jürgen Bathe View the complete course: http://ocw.mit.edu/RES2-002S10 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT Linear Finite Element Analysis

Aircraft Longitudinal & Lateral/Directional Models & Modes (Phugoid, Short Period, Dutch Roll, etc.)
In this video we break apart the linear aircraft model into 2 separate linear models (the longitudinal model and the lateral/directional model). We show that at certain flight conditions, these models are decoupled and therefore can be treated/simulated independently. From these simplifi
From playlist Flight Mechanics

Slides and more information: https://mml-book.github.io/slopes-expectations.html
From playlist There and Back Again: A Tale of Slopes and Expectations (NeurIPS-2020 Tutorial)
Composition of 2 Line Reflections: What Can You Conclude?
Engage here: https://www.geogebra.org/m/NUtDnGgC#material/mjQyuKfG
From playlist Geometry: Dynamic Interactives!

From playlist COMP0168 (2020/21)