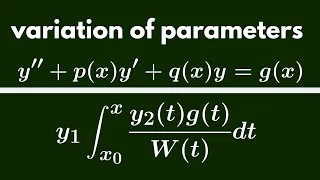
Differential Equations | Variation of Parameters.
We derive the general form for a solution to a differential equation using variation of parameters. http://www.michael-penn.net
From playlist Differential Equations

C49 Example problem solving a system of linear DEs Part 1
Solving an example problem of a system of linear differential equations, where one of the equations is not homogeneous. It's a long problem, so this is only part 1.
From playlist Differential Equations

B06 Example problem with separable variables
Solving a differential equation by separating the variables.
From playlist Differential Equations

B04 Example problem with separable variables
Solving a differential equation by separating the variables.
From playlist Differential Equations

B07 Example problem with separable variables
Solving a differential equation by separating the variables.
From playlist Differential Equations

B05 Example problem with separable variables
Solving a differential equation by separating the variables.
From playlist Differential Equations

C33 Example problem using variation of parameters
Another example problem using the method of variation of parameters on second-order, linear, ordinary DE's.
From playlist Differential Equations
Introduction to Differential Equations
Please Subscribe here, thank you!!! https://goo.gl/JQ8Nys Introduction to Differential Equations - The types of differential equations, ordinary versus partial. - How to find the order of a differential equation.
From playlist Differential Equations

Delay Dynamical Systems (Lecture 1) by Debabrata Biswas
PROGRAM TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID) ORGANIZERS: Partha Sharathi Dutta (IIT Ropar, India), Vishwesha Guttal (IISc, India), Mohit Kumar Jolly (IISc, India) and Sudipta Kumar Sinha (IIT Ropar, India) DATE: 19 September 2022 to 30 September 2022 VENUE: Ramanujan Lecture Hall an
From playlist TIPPING POINTS IN COMPLEX SYSTEMS (HYBRID, 2022)

C65 Exampe problem illustrating transient and steady state terms
Solving an example problem showing the transient and steady-state terms of the solution.
From playlist Differential Equations

Periodic delay orbits and the polyfold IFT - Irene Seifert
Joint IAS/Princeton/Montreal/Paris/Tel-Aviv Symplectic Geometry Topic: Periodic delay orbits and the polyfold IFT Speaker: Irene Seifert Affiliation: Heidelberg University Date: May 28, 2021 Differential delay equations arise very naturally, but they are much more complicated than ordin
From playlist Mathematics
Lecture 6, Systems Represented by Differential Equations | MIT RES.6.007 Signals and Systems
Lecture 6, Systems Represented by Differential Equations Instructor: Alan V. Oppenheim View the complete course: http://ocw.mit.edu/RES-6.007S11 License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT RES.6.007 Signals and Systems, 1987

Transdifferentiation and oscillatory states in gene regulatory networks by Mithun Kumar Mitra
Indian Statistical Physics Community Meeting 2016 URL: https://www.icts.res.in/discussion_meeting/details/31/ DATES Friday 12 Feb, 2016 - Sunday 14 Feb, 2016 VENUE Ramanujan Lecture Hall, ICTS Bangalore This is an annual discussion meeting of the Indian statistical physics community wh
From playlist Indian Statistical Physics Community Meeting 2016

Kota Ikeda - Theoretical study of the emergence of periodic solutions...
Theoretical study of the emergence of periodic solutions for the inhibitory NNLIF neuronmodel with synaptic delay ---------------------------------- Institut Henri Poincaré, 11 rue Pierre et Marie Curie, 75005 PARIS http://www.ihp.fr/ Rejoingez les réseaux sociaux de l'IHP pour être au co
From playlist Workshop "Workshop on Mathematical Modeling and Statistical Analysis in Neuroscience" - January 31st - February 4th, 2022

Natural Solutions to Delay Differential Equations
Mathematica has provided a strong platform for developing a new approach to solving problems containing delay differential equations (DDE). In particular, a method has been developed for finding natural analytic solutions that do not require a priori history to be specified. The "natural"
From playlist Wolfram Technology Conference 2021

In this Wolfram Technology Conference presentation, Pradipto Ghosh and Bob Sandheinrich demonstrate a series of examples showing how to model, analyze, design, and simulate controls systems with Mathematica. To learn more about Mathematica, please visit: http://www.wolfram.com/mathematica
From playlist Wolfram Technology Conference 2012

Speech and Audio Processing 4: Speech Coding I - Professor E. Ambikairajah
Speech and Audio Processing Speech Coding - Lecture notes available from: http://eemedia.ee.unsw.edu.au/contents/elec9344/LectureNotes/
From playlist ELEC9344 Speech and Audio Processing by Prof. Ambikairajah

Deep Delay Autoencoders Discover Dynamical Systems w Latent Variables: Deep Learning meets Dynamics!
Video abstract for "Discovering Governing Equations from Partial Measurements with Deep Delay Autoencoders" by Joseph Bakarji, Kathleen Champion, J. Nathan Kutz, Steven L. Brunton https://arxiv.org/abs/2201.05136 https://www.josephbakarji.com/ A central challenge in data-driven model d
From playlist Research Abstracts from Brunton Lab

A first example problem solving a linear, second-order, homogeneous, ODE with variable coefficients around a regular singular point.
From playlist Differential Equations

7. Discrete Approximation of Continuous-Time Systems
MIT MIT 6.003 Signals and Systems, Fall 2011 View the complete course: http://ocw.mit.edu/6-003F11 Instructor: Dennis Freeman License: Creative Commons BY-NC-SA More information at http://ocw.mit.edu/terms More courses at http://ocw.mit.edu
From playlist MIT 6.003 Signals and Systems, Fall 2011