
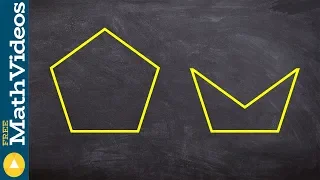
What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What are the names of different types of polygons based on the number of sides
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

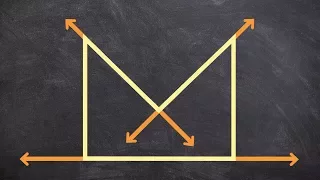
Geometry - Ch. 1: Basic Concepts (28 of 49) What are Convex and Concave Angles?
Visit http://ilectureonline.com for more math and science lectures! In this video I will explain how to identify convex and concave polygons. Convex polygon: When extending any line segment (side) it does NOT cut through any of the other sides. Concave polygon: When extending any line seg
From playlist THE "WHAT IS" PLAYLIST
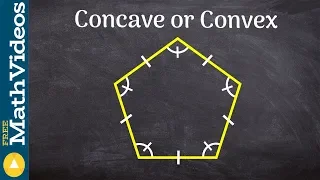
Determine if a polygon is concave or convex ex 2
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

What is the difference between concave and convex polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Lecture 3 | Convex Optimization I (Stanford)
Professor Stephen Boyd, of the Stanford University Electrical Engineering department, lectures on convex and concave functions for the course, Convex Optimization I (EE 364A). Convex Optimization I concentrates on recognizing and solving convex optimization problems that arise in engine
From playlist Lecture Collection | Convex Optimization

Lecture 4 | Convex Optimization I (Stanford)
Professor Stephen Boyd, of the Stanford University Electrical Engineering department, continues his lecture on convex functions in electrical engineering for the course, Convex Optimization I (EE 364A). Complete Playlist for the Course: http://www.youtube.com/view_play_list?p=3940DD956
From playlist Lecture Collection | Convex Optimization

Lecture 2 | Convex Optimization I (Stanford)
Guest Lecturer Jacob Mattingley covers convex sets and their applications in electrical engineering and beyond for the course, Convex Optimization I (EE 364A). Convex Optimization I concentrates on recognizing and solving convex optimization problems that arise in engineering. Convex se
From playlist Lecture Collection | Convex Optimization

An Introduction to Geodesic Convexity - Nisheeth Vishnoi
Optimization, Complexity and Invariant Theory Topic: An Introduction to Geodesic Convexity Speaker: Nisheeth Vishnoi Affiliation: EPFL Date: June 7. 2018 For more videos, please visit http://video.ias.edu
From playlist Mathematics

Jean-Bernard Lasserre: The moment-LP and moment-SOS approaches
Find this video and other talks given by worldwide mathematicians on CIRM's Audiovisual Mathematics Library: http://library.cirm-math.fr. And discover all its functionalities: - Chapter markers and keywords to watch the parts of your choice in the video - Videos enriched with abstracts, b
From playlist Control Theory and Optimization

(IC 3.2) Entropy as a lower bound on expected length (part 2)
The expected codeword length of a symbol code is bounded below by the entropy of the source. A playlist of these videos is available at: http://www.youtube.com/playlist?list=PLE125425EC837021F
From playlist Information theory and Coding

3D convex contact forms and the Ruelle invariant - Oliver Edtmair
Joint IAS/Princeton/Montreal/Paris/Tel-Aviv Symplectic Geometry Topic: 3D convex contact forms and the Ruelle invariant Speaker: Oliver Edtmair Affiliation: Berkeley Date: January 29, 2021 For more video please visit http://video.ias.edu
From playlist Mathematics
Using Excel to check convexity for splines | Algebraic Calculus One | Anna Tomskova
In this video, Dr Anna Tomskova explains how to use Excel to create a worksheet to check convexity of a given COPS (cyclic oriented polygonal spline), using the framework of signed areas. Anna demonstrates the use of the program also view a GeoGebra visualization. Besides reviewing basic a
From playlist Algebraic Calculus One

Fixed Income: Bullet versus Barbell Bond Portfolio (FRM T4-40)
The bullet portfolio invests in a single medium-term bond. The corresponding barbell portfolio invests the same amount of capital and achieves the same duration, but invests in a mix of the short-term plus long-term bond. But the barbell portfolio will have greater convexity. Tuckman expla
From playlist Valuation and RIsk Models (FRM Topic 4)

Yakov Eliashberg - Interplay between notions of convexity in complex, symplectic and contact (...)
The classical notions of holomorphic, polynomial, rational convexity, and pseudo-convexity in complex geometry have their counterparts in symplectic and contact geometries. Understanding the relationship between these notions is important for all these fields. Yakov Eliashberg (Stanford)
From playlist Not Only Scalar Curvature Seminar

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons