Carlo Gasbarri: Liouville’s inequality for transcendental points on projective varieties
Abstract: Liouville inequality is a lower bound of the norm of an integral section of a line bundle on an algebraic point of a variety. It is an important tool in may proofs in diophantine geometry and in transcendence. On transcendental points an inequality as good as Liouville inequality
From playlist Algebraic and Complex Geometry

Summary for solving one variable inequalities
👉 Learn about solving an inequality and graphing it's solution. An inequality is a relation where the expression in the left hand side is not equal to the expression in the right hand side of the inequality sign. A linear inequality is an inequality whose highest power in the variable(s) i
From playlist Solve and Graph Inequalities | Learn About

How to solve and graph one variable inequalities
👉 Learn about solving an inequality and graphing it's solution. An inequality is a relation where the expression in the left hand side is not equal to the expression in the right hand side of the inequality sign. A linear inequality is an inequality whose highest power in the variable(s) i
From playlist Solve and Graph Inequalities | Learn About

Why do we have to flip the sign when we divide or multiply by negative one - Cool Math
👉 Learn about solving an inequality and graphing it's solution. An inequality is a relation where the expression in the left hand side is not equal to the expression in the right hand side of the inequality sign. A linear inequality is an inequality whose highest power in the variable(s) i
From playlist Solve and Graph Inequalities | Learn About

Borel-Cantelli Lemmas for Inhomogeneous Diophantine Approximations and beyond by Victor Beresnevich
PROGRAM : ERGODIC THEORY AND DYNAMICAL SYSTEMS (HYBRID) ORGANIZERS : C. S. Aravinda (TIFR-CAM, Bengaluru), Anish Ghosh (TIFR, Mumbai) and Riddhi Shah (JNU, New Delhi) DATE : 05 December 2022 to 16 December 2022 VENUE : Ramanujan Lecture Hall and Online The programme will have an emphasis
From playlist Ergodic Theory and Dynamical Systems 2022

What do you need to know to solve one variable inequalities
👉 Learn about solving an inequality and graphing it's solution. An inequality is a relation where the expression in the left hand side is not equal to the expression in the right hand side of the inequality sign. A linear inequality is an inequality whose highest power in the variable(s) i
From playlist Solve and Graph Inequalities | Learn About

The role of topology and compactness (...) - CEB T2 2017 - Varadhan - 1/3
S.R.S. Varadhan (Courant Institute) - 06/06/2017 The role of topology and compactness in the theory of large deviations When a large deviation result is proved there is some topology involved in the statement because it affects the class of sets for which the estimates hold. Often the cho
From playlist 2017 - T2 - Stochastic Dynamics out of Equilibrium - CEB Trimester

Rolf Schneider: Hyperplane tessellations in Euclidean and spherical spaces
Abstract: Random mosaics generated by stationary Poisson hyperplane processes in Euclidean space are a much studied object of Stochastic Geometry, and their typical cells or zero cells belong to the most prominent models of random polytopes. After a brief review, we turn to analogues in sp
From playlist Probability and Statistics

Eulalia Nualart: Asymptotics for some non-linear stochastic heat equations
Abstract: Consider the following stochastic heat equation, ∂ut(x)/∂t = −ν(−Δ)α/2ut(x)+σ(ut(x))F˙(t,x),t[is greater than]0,x∈ℝd. Here −ν(−Δ)α/2 is the fractional Laplacian with ν[is greater than]0 and α∈(0,2], σ:ℝ→ℝ is a globally Lipschitz function, and F˙(t,x) is a Gaussian noise which is
From playlist Probability and Statistics

Dmitryi Bilyk: Uniform distribution, lacunary Fourier series, and Riesz products
Uniform distribution theory, which originated from a famous paper of H. Weyl, from the very start has been closely connected to Fourier analysis. One of the most interesting examples of such relations is an intricate similarity between the behavior of discrepancy (a quantitative measure of
From playlist HIM Lectures: Trimester Program "Harmonic Analysis and Partial Differential Equations"

Ex: Determine if Ordered Pairs Satisify a Linear Inequality in Two Variables (09x-42)
This video explains how to determine if an ordered pair satisfies a linear inequality in two variable. The results are verified graphically.
From playlist The Coordinate Plane, Plotting Points, and Solutions to Linear Equations in Two Variables

Intrinsic Diophantine approximation (Lecture 3) by Amos Nevo
PROGRAM SMOOTH AND HOMOGENEOUS DYNAMICS ORGANIZERS: Anish Ghosh, Stefano Luzzatto and Marcelo Viana DATE: 23 September 2019 to 04 October 2019 VENUE: Ramanujan Lecture Hall, ICTS Bangalore Ergodic theory has its origins in the the work of L. Boltzmann on the kinetic theory of gases.
From playlist Smooth And Homogeneous Dynamics

Shrinking targets and eventually always hitting points by Maxim Kirsebom
Program Probabilistic Methods in Negative Curvature ORGANIZERS: Riddhipratim Basu, Anish Ghosh and Mahan Mj DATE: 11 March 2019 to 22 March 2019 VENUE: Madhava Lecture Hall, ICTS, Bangalore The focal area of the program lies at the juncture of three areas: Probability theory o
From playlist Probabilistic Methods in Negative Curvature - 2019

Algebra - Ch. 3: Formula, Inequalities, Absolute Value (16 of 33) What is a Linear Inequality? 1
Visit http://ilectureonline.com for more math and science lectures! In this video I will explain what is a linear inequality (“less than” or “greater than”) and show 3 examples of 2 different ways to express the same inequality and how to graphically express that inequality. (Part 1) To
From playlist ALGEBRA CH 3 FORMULAS, INEQUALITIES, ABSOLUTE VALUES

Algebra - Ch. 3: Formula, Inequalities, Absolute Value (17 of 33) What is a Linear Inequality? 2
Visit http://ilectureonline.com for more math and science lectures! In this video I will explain what is a linear inequality (“less than or equal to” or “greater than or equal to”) and show 3 examples of 2 different ways to express the same inequality and how to graphically express that i
From playlist ALGEBRA CH 3 FORMULAS, INEQUALITIES, ABSOLUTE VALUES

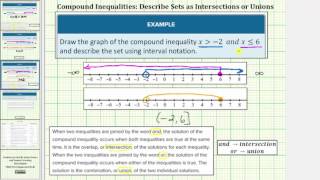
Solutions to Basic AND Compound Inequalities
This video explains how to graph the solution to an AND compound inequality and express the solution using interval notation. http://mathispower4u.com
From playlist Solving and Graphing Compound Inequalities

How to graph a system of linear inequalities in slope intercept form
👉 Learn how to graph a system of inequalities. A system of inequalities is a set of inequalities which are collectively satisfied by a certain range of values for the variables. To graph a system of inequalities, each inequality making up the system is graphed individually with the side of
From playlist Solve a System of Inequalities by Graphing
Lagrangian chaos and mixing for models in fluid mechanics by Alex Blumenthal
PROGRAM SMOOTH AND HOMOGENEOUS DYNAMICS ORGANIZERS: Anish Ghosh, Stefano Luzzatto and Marcelo Viana DATE: 23 September 2019 to 04 October 2019 VENUE: Ramanujan Lecture Hall, ICTS Bangalore Ergodic theory has its origins in the the work of L. Boltzmann on the kinetic theory of gases.
From playlist Smooth And Homogeneous Dynamics