
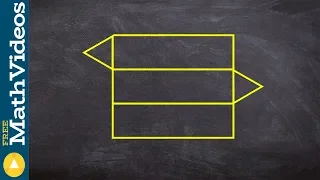
What is the difference between convex and concave
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
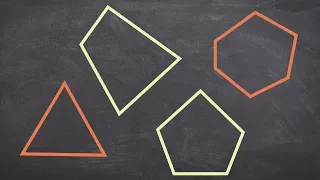
What are four types of polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
What is the difference between a regular and irregular polygon
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

Lecture 6 | Convex Optimization II (Stanford)
Lecture by Professor Stephen Boyd for Convex Optimization II (EE 364B) in the Stanford Electrical Engineering department. Professor Boyd lectures on the localization and cutting-plane methods and then moves into the Analytic center cutting-plane methods. This course introduces topics su
From playlist Lecture Collection | Convex Optimization
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Hermitian and Non-Hermitian Laplacians and Wave Equaions by Andrey shafarevich
Non-Hermitian Physics - PHHQP XVIII DATE: 04 June 2018 to 13 June 2018 VENUE:Ramanujan Lecture Hall, ICTS Bangalore Non-Hermitian Physics-"Pseudo-Hermitian Hamiltonians in Quantum Physics (PHHQP) XVIII" is the 18th meeting in the series that is being held over the years in Quantum Phys
From playlist Non-Hermitian Physics - PHHQP XVIII

Lecture 7 | Convex Optimization II (Stanford)
Lecture by Professor Stephen Boyd for Convex Optimization II (EE 364B) in the Stanford Electrical Engineering department. Professor Boyd finishes his lecture on Analytic center cutting-plane method, and begins Ellipsoid methods. This course introduces topics such as subgradient, cutting
From playlist Lecture Collection | Convex Optimization

Klaus Künnemann: A tropical approach to non archimedean Arakelov theory I
The lecture was held within the framework of the Junior Hausdorff Trimester Program Algebraic Geometry. (04.2.2014)
From playlist HIM Lectures: Junior Trimester Program "Algebraic Geometry"

Mohammed Abouzaid - Family Floer cohomology and mirror symmetry
Mohammed ABOUZAID (Columbia Univ., New York USA)
From playlist Algèbre, Géométrie et Physique : une conférence en l'honneur
Lecture 12 | Convex Optimization I (Stanford)
Professor Stephen Boyd, of the Stanford University Electrical Engineering department, lectures on geometric problems in the context of electrical engineering and convex optimization for the course, Convex Optimization I (EE 364A). Convex Optimization I concentrates on recognizing and so
From playlist Lecture Collection | Convex Optimization

Lecture 5 | Convex Optimization II (Stanford)
Lecture by Professor Stephen Boyd for Convex Optimization II (EE 364B) in the Stanford Electrical Engineering department. Professor Boyd introduces stochastic programing and the localization and cutting-plane methods. This course introduces topics such as subgradient, cutting-plane, and
From playlist Lecture Collection | Convex Optimization

Nets of polyhedra | Perimeter, area, and volume | Geometry | Khan Academy
We know...."nets of polyhedra" sounds like the title of a bad sci-fi movie about man-eating, muti-headed fish. A polyhedron ("polyhedra" is plural) is nothing more than a 3 dimensional shape with flat surfaces and straight edges (think: cube) Practice this lesson yourself on KhanAcademy.o
From playlist High School Geometry | High School Math | Khan Academy
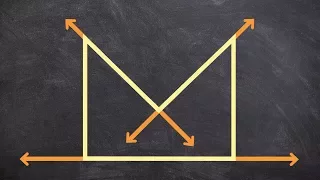
What is the difference between convex and concave polygons
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons

👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Twitch Talks - Polygons & Polyhedra
Presenter: Charles Pooh Wolfram Research developers demonstrate the new features of Version 12 of the Wolfram Language that they were responsible for creating. Previously broadcast live on June 13, 2019 at twitch.tv/wolfram. For more information, visit: https://www.wolfram.com/language/12
From playlist Twitch Talks
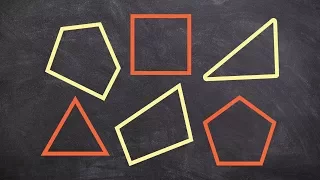
What is a polygon and what is a non example of a one
👉 Learn about polygons and how to classify them. A polygon is a plane shape bounded by a finite chain of straight lines. A polygon can be concave or convex and it can also be regular or irregular. A concave polygon is a polygon in which at least one of its interior angles is greater than 1
From playlist Classify Polygons
Boris Apanasov: Non-rigidity for Hyperbolic Lattices and Geometric Analysis
Boris Apanasov, University of Oklahoma Title: Non-rigidity for Hyperbolic Lattices and Geometric Analysis We create a conformal analogue of the M. Gromov-I. Piatetski-Shapiro interbreeding construction to obtain non-faithful representations of uniform hyperbolic 3-lattices with arbitrarily
From playlist 39th Annual Geometric Topology Workshop (Online), June 6-8, 2022